
题目
试分析以下例子中哪些是人为地利用反馈控制,以达到预期指标的自动控制装置。
(1)蒸汽机的调速系统;(2)照明系统中并联的电灯;(3)电冰箱的恒温系统;(4)家用全自动洗衣机。
 更多“试分析以下例子中哪些是人为地利用反馈控制,以达到预期指标的自动控制装置。 (1)蒸汽机的调速系统;(2)照明”相关的问题
更多“试分析以下例子中哪些是人为地利用反馈控制,以达到预期指标的自动控制装置。 (1)蒸汽机的调速系统;(2)照明”相关的问题
第1题
试分析以下例子中哪些是人为地利用反馈控制,以达到预期指标的自动控制装置。
(1)蒸汽机的调速系统;(2)照明系统中并联的电灯;(3)电冰箱的恒温系统;(4)家用全自动洗衣机。
第3题
A、拍摄时利用照明灯具或反光材料来提高景物暗部亮度值
B、利用暗色调物体做拍摄前景
C、利用景别变化压缩景物亮度范围
D、尽量选择具有丰富的影调变化或色调变化的景物作为拍摄对象
E、人为地对被摄体进行合理的明暗、颜色搭配
第6题
在下列这些持续运动的过程中,都存在信息的传输,并利用反馈来进行控制,试加以说明。
(1)人骑自行车;(2)人驾驶汽车;(3)行驶中的船。
第7题
在下列这些持续运动的过程中,都存在信息的传输,并利用反馈来进行控制,试加以说明。
(1)人骑自行车;(2)人驾驶汽车;(3)行驶中的船。
第9题
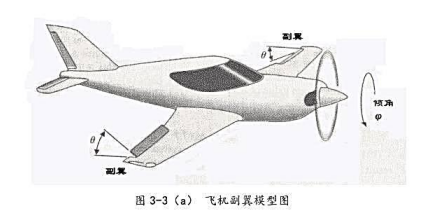
这里所要讨论的自动驾驶仪是一个自动控制系统,它通过调节副翼表面来控制倾角φ,只要使副翼表面产生一个θ的变形,气压在这些表面上会产生一个扭矩,使飞机产生侧滚。飞机副翼是由液压操纵杆来控制的,后者的传递函数为1/s。
测量实际的倾角φ,并与输入设定值进行比较,其差值被用来驱动液压操纵杆,而液压操纵杆则反过来又会引起副翼表面产生变形。
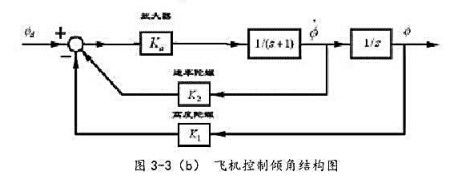
为简单化起见,这里假定飞机的侧滚运动与其他运动无关,其结构图如图3-3(b)所示,又假定K1=1,且角速率φ由速率陀螺将其值进行反馈,期望的阶跃响应的超调量σ%≤10%,调节时间(以±2%的标准)ts≤9s,试选择合适的Ka和K2值。
第11题
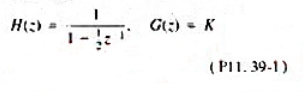
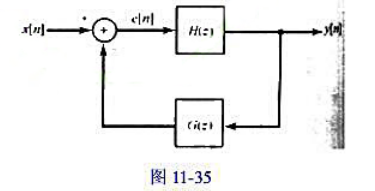
考虑图13-35所示的反馈系统,其
(a)画出K>0时的根轨迹图。
(b)画出K<0时的根轨迹图。注意:对这个根轨迹要细心些。在实轴上应用角判据会发现,随着K从零开始减小,闭环极点沿着正实轴。
趋向于z=+∞然后再沿着负实轴从z=-∞返回来。验证这一点实际上是把闭环极点作为K的函数,以显式求解的情况。试问K为何值时,极点在|x|=∞?
(c)求出使闭环系统稳定的全部K值的范围。
(d)在(b)中看到的现象是如下事实的一个直接结果:在这个例子中,G(z)H(z)的分子分母同阶次。当这种情况出现在离散时间反馈系统中时,意味着在系统中存在一个无延迟的回路。也就是说,在一个给定时间点上的输出被反馈到系统中,又依次返回来影响在同一时刻点上的自身值。为了能看出这正是在这个例子中考虑的情况,试写出联系y[n]和e[n]的差分方程,然后利用该反馈系统的输入和输出表示e[n],将此结果与

的反馈系统的结果相对照。
具有无延迟回路的主要后果是:这样的反馈系统是不能按所画出的反馈形式来实现的。
(e)证明:除了使闭环极点在|z|=∞的K值以外,式(P11.39-1)代表了一个因果系统。

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“赏学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!
































